ARIM (Autonomous Robotic Sea-Floor Infrastructure for Bentho-Pelagic Monitoring) is a multi-national joint effort to establish novel sampling and processing technologies combined with a robust benthic based infrastructure that approach these sampling challenges. The product should fulfil the requirements from industry/government monitoring as well as basic research.
In detail, the consortium will:
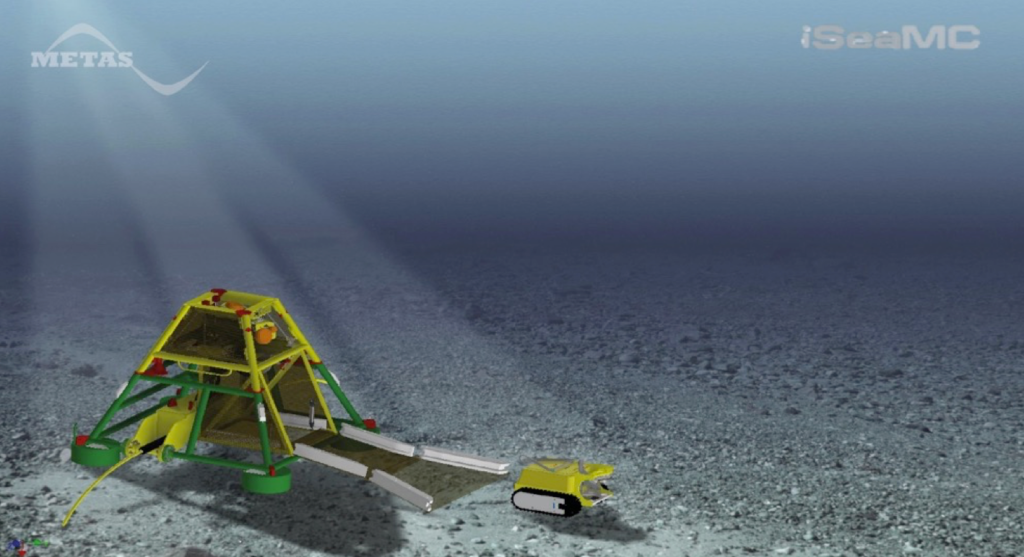
– Create a docking interface between a cable node system for ROV free maintenance with a Rossia 300 – 3000 crawler to provide independence from a power transmitting float cable.
– Drastically increase the operational area and capability of the crawler by using an extended fibre-optic cable and provide the option to operate without umbilical.
– Provide crawler intervention and sampling capabilities through implementation of the manipulator arm.
– Construct a deep-sea fuel cell to provide energy for long-term self-sustained operations.
– Improve observation capacities using state of the art active acoustics and 3D camera technologies.
– Implement routines for automatic organism classification and individual tracking and integrate with the crawler sensors. – Demonstrate performance and develop training facilities for new users and markets.
 1) Institute of Marine Research, Norway
1) Institute of Marine Research, Norway
2) iSeaMC, Germany
3) Kraken Robotik, Germany
4) GEOMAR, Germany
5) Metas, Norway
6) Deusto Sistemas, Vitoria, Spain
7) CNR-ISMAR, La Spezia Italy
8) Instituto de Ciencias del Mar (ICM-CSIC), Barcelona, Spain