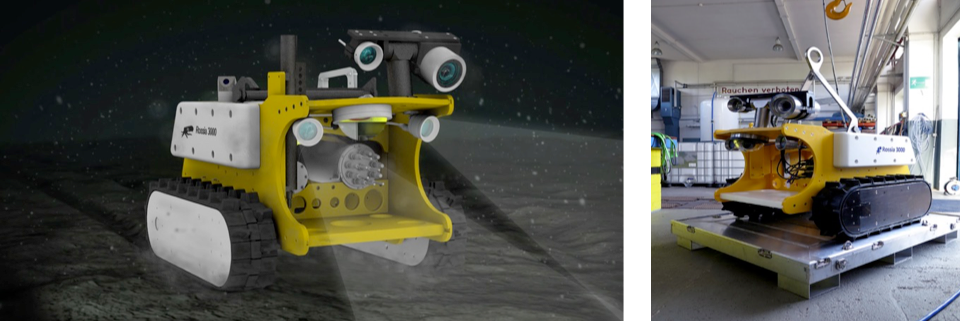
Our new generation of seafloor robots
Our robots are regularly operating at 900 m water depth for 12 – 18 months since 2010.
These highly reliable tele-operated systems have been regularly improved and after 10 years of development we can now offer our latest version. This small robot offers a higher payload with enhanced control electronics and can be deployed down to 6000 m water depth.


Modern marine survey technologies utilze a toolbox of robotic infrastructure including ROVs , AUVs, Glider and sea floor crawlers which grant maximum success when specifically applied.
Crawler Specifications
| Main Frame and caterpillar section | PEHD-500 |
| Vehicle | LWH 140x 100x 85 cm |
| Weight in air | 280 kg approx. |
| Control unit | carbon fibre with titanium grade 5 caps |
| Payload | 120 kg approx |
| Max depth | 6000 m |
| Buoyancy | Solid cell structure |
| Power input | 48 V |
| Motors | Dunker, 600 W |
| Speed approx | 0.1 to 0.5 m/s |
| Camera | Wisenet XNP-6040H or similar |
| Camera 2, option | Low light Sony camera, 0,05 lux |
| Lights, standard | Up to 140 Watt neutral white light |
| Sensors | CTD, ADCP, turbidity, chlorophyll, methane, and others on demand |
| Compass | TCM-XB compass |
Optional equipment
| Sony low light camera, 3 D laser camera for navigation and mapping, micro-optodes |
| PTU unit |
| Manipulator Electric 5e manipulator |
| Surface buoy for tele-operations from ship or shore |
| Full autonomy package (2020) |
Comparison Crawler / AUV, Glider / ROV
Crawler typically monitor areas of 0.1 to 1 km2 size
Applicability and Safety
- simpler technology in terms of complexity, costs, and robustness, less personal intensive
- missions can be transferred via internet onto the ship before deployment
- can safely be switched off, energy efficient, stays on the spot.
- qualifies for longterm operation both regarding robustness and energy efficiency
Stability
- solid base from which to work and sample. Sensors can be placed more precisely than with swimming robots
- a robotic arm (on demand) allows direct access into complex habitats such as reefs (teleoperated mode)
Repeatability
- not affected by current flow conditions and can return to resample locations easier
- less personal bias in sampling. Can be operated with one person
- at cabled observatories, experts can drive and analyze via internet
Payload and instrumentation
- Crawlers have a very high pay load capacity exceeding ROVs, AUVs and Glider by a factor of 10 to 15.
- sensors and profilers can precisely penetrate the seafloor; by mounting such systems at the front of a crawler, undisturbed areas can be profiled for oxygen, pH, methane, CO2, etc
- very detailed transect analyses of sediment surfaces with laser guided habitat mapping.
Field Work
Crawlers can be deployed with WLAN connection from the beach, from ships, operate from junction boxes, or monitor the area with full autonomy.